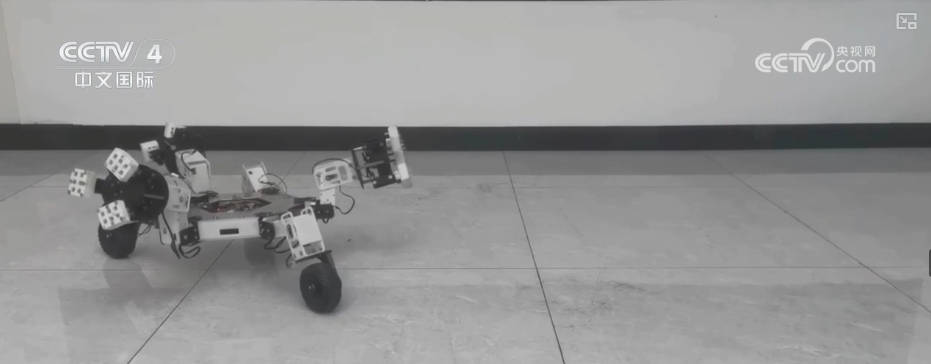
CCTV 뉴스 : 우주 채굴, 과거의 공상 과학 소설과 영화에 등장한이 장면은 점차 현실로 나아가고 있습니다. 얼마 전, 중국 최초의 우주 채굴 로봇은 중국 광업 기술 대학에서 태어났습니다. 3 륜 발, 3 개의 클로가있는 발, 우주에서 미세 촬영 환경에 적응합니다
 <" "/>>. class = "photo_img_20190808">
<" "/>>. class = "photo_img_20190808"> 
이것은 Liu x x x x x x x x a hisearte aming and stame of iniational of in University의 Liu-Funtional Mining에 의해 개발 된 다기능 공간 마이닝 로봇에 의해 개발되었습니다. 기술. 인기있는 휴머노이드 로봇 및 로봇 개와는 달리, 우주 채굴 로봇의 기본 형태는 3 개의 바퀴 달린 발과 3 개의 발톱이있는 hexapod 모드입니다. Liu Xinhua 교수는 이러한 방식으로 디자인 한 이유는 주로 우주의 미세 중력 환경에 적응하기위한 것이라고 소개했습니다. 곤충 발톱 찌름 구조, 발톱 찌름 발은 더 강한 그립 능력을 가지고 있습니다

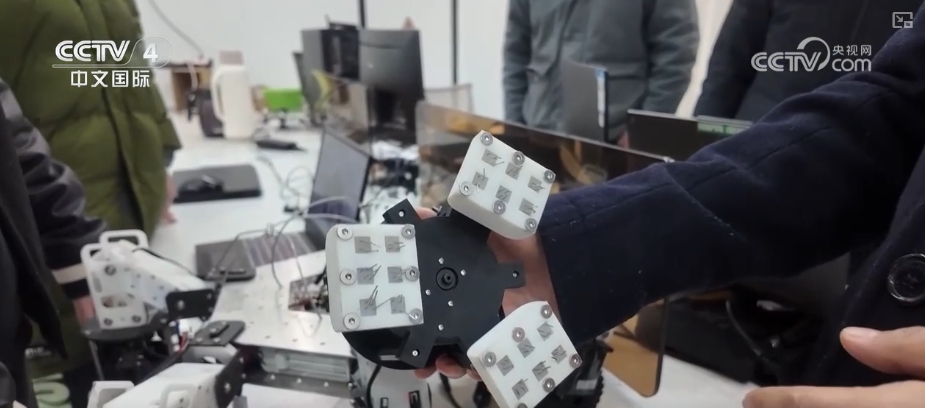
우주 채굴 로봇은 외계 신체에 대한 지질 탐사 및 미네랄 수집 작업을 완료해야하며 드릴링은 필요한 스크린입니다. 지구의 중력 환경에서 로봇 자체는 드릴 비트를 지원하기에 충분합니다. 달의 중력은 지구의 중력의 1/6에 불과하며 대부분의 소행성은 미세 중량성이 낮습니다. 드릴 비트가 스타 몸의 표면을 매끄럽게 만드는 방법은 큰 문제가됩니다. 무중력으로 인한 드리프트를 해결하기 위해 Scientific Research 팀은 곤충의 발톱 피어싱 구조를 시뮬레이션하려는 생각을해서 우주 채굴 로봇을위한 특수 발톱 피어싱 발을 설계했습니다.

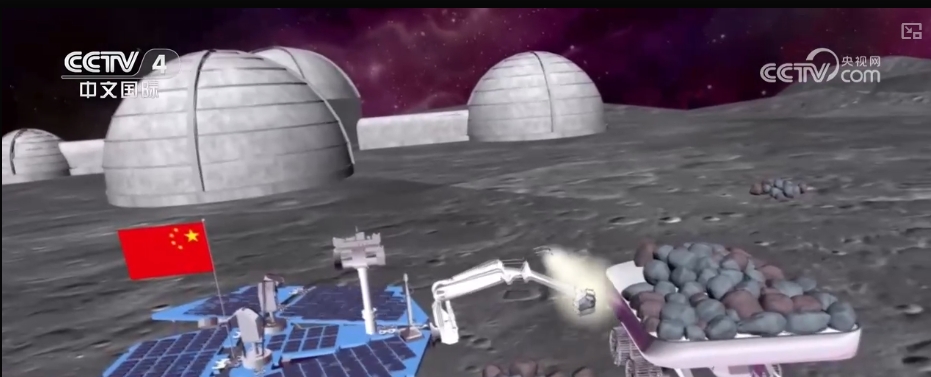
전문가들은 제한된 지구 자원의 위협 하에서 피로의 딜레마에 직면 한 인간이 공간에 들어가는 것은 불가피한 선택이라고 도입했습니다. 지구의 유일한 자연 위성으로서 달은 지구에 비교적 가까운 장점과 풍부한 자원을 가지고 있습니다. 현재 음력 자원의 탐구와 연구는 세계에서 가장 높으며 과학 연구에 대한 투자도 가장 큽니다. 문 리소스는 인류가 개발하고 사용하여 최초의 우주 자원이 될 수 있습니다. class = "photo_img_20190808">